AI 휴머노이드 로봇 만들기
AI 휴머노이드 로봇 만들기
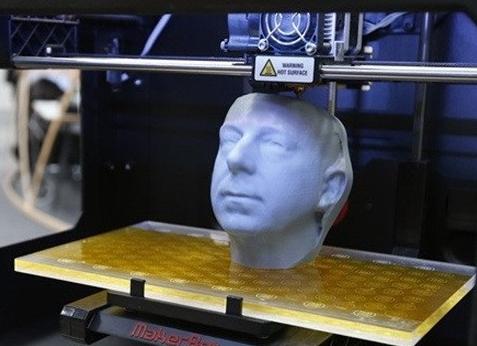
오픈소스로 개발된 3D 프린터 기반의 AI 휴머노이드 로봇으로, 누구나 제작하고 개조할 수 있는 장점이 있습니다. 이 글에서는 로봇을 3D 프린터를 활용해 만드는 방법과 기술적 요소를 다뤄보겠습니다.
1. 프로젝트
3D 프린터로 제작할 수 있도록 설계되어 있으며, 로봇 공학, AI, 그리고 메카트로닉스를 학습하는 데 최적화된 프로젝트입니다.
로봇의 특징
3D 프린터 활용: 대부분의 부품을 FDM 방식의 3D 프린터로 출력 가능
모듈형 구조: 개별 부품을 출력해 조립하는 방식으로 확장 가능
AI 및 IoT 연동 가능: 음성 인식, 얼굴 인식, 모션 컨트롤 등이 가능
오픈소스 프로젝트: 누구나 자유롭게 수정하고 활용 가능
2. 필요한 3D 프린터 및 소재 선택
(1) 적합한 3D 프린터 선택
로봇은 FDM 방식의 3D 프린터를 사용하여 제작할 수 있으며, 다음과 같은 사양을 갖춘 프린터가 필요합니다.
프린터 베드 크기: 최소 200 x 200 x 200mm (일부 부품은 300mm 크기 필요)
노즐 직경: 0.4mm 권장 (정밀도와 출력 속도 균형 유지)
필라멘트 종류: PLA, ABS, PETG 사용 가능
추천 모델: Creality Ender 3, Prusa i3 MK3, Anycubic Kobra Plus, Bambu Lab P1P
(2) 필라멘트(소재) 선택

3. 로봇의 주요 부품 및 3D 프린팅 가이드
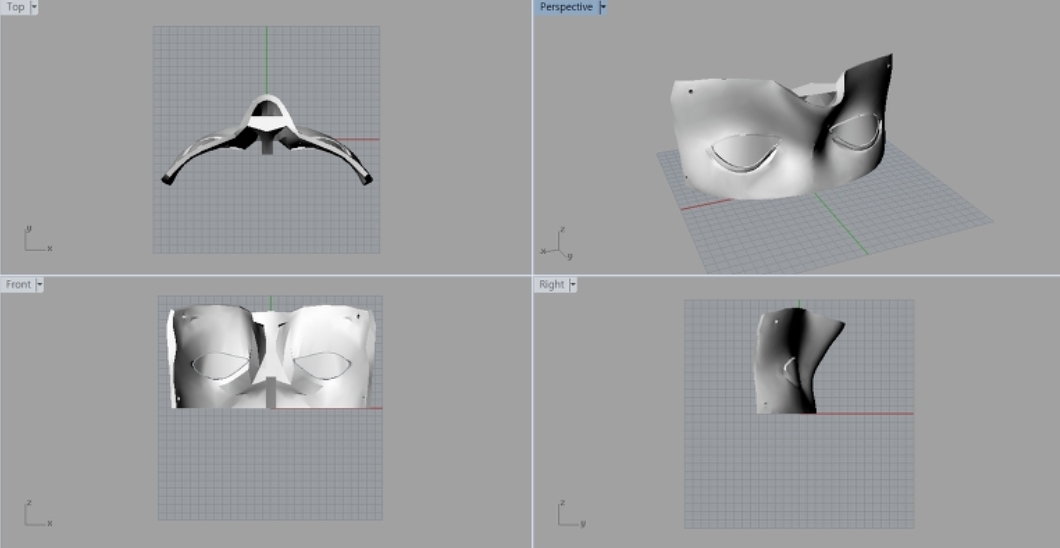
(1) 머리(Head)
기능: 얼굴 인식 카메라, 스피커, 마이크 장착 가능
출력 팁: 조립이 용이하도록 2~3개 파트로 분할 출력
서보 모터: MG995 또는 MG996R 서보 모터 사용
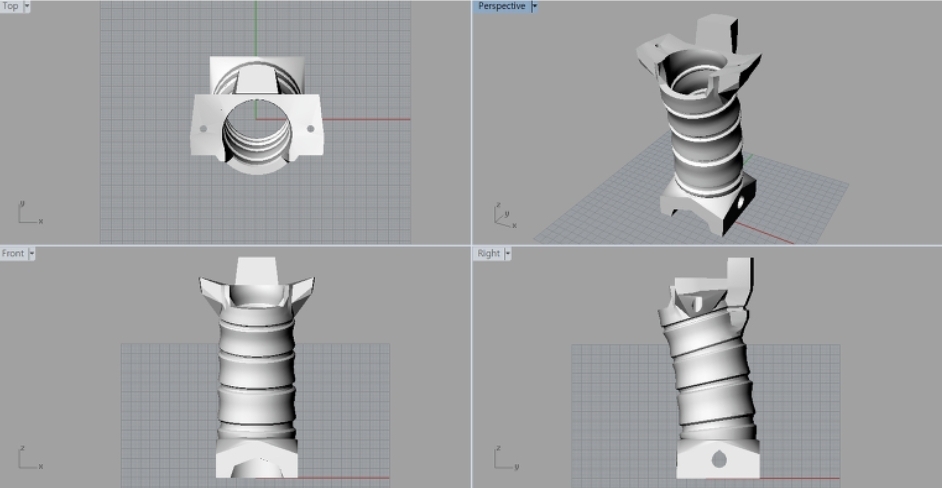
(2) 목(Neck)
기능: 좌우 회전 및 상하 기울기
출력 팁: 볼 베어링 삽입 공간 확보, 서포트 최소화 설계
모터 추천: 2DOF 또는 3DOF 서보 모터 사용
(3) 팔(Arm) 및 손(Hand)
기능: 손가락 개별 제어, 물건 잡기 가능
출력 팁: 손가락 부분은 TPU 소재 사용 가능
서보 모터: SG90, MG995 서보 활용
(4) 몸통(Torso)
기능: 서보 모터와 배터리, 전자 부품 장착
출력 팁: 내부 배선이 쉽게 정리될 수 있도록 설계
(5) 다리(Legs) (옵션)
현재 InMoov는 공식적으로 다리 부품이 없지만, 확장이 가능합니다.
4. 조립 및 후가공
(1) 출력 후 후가공
서포트 제거: 커터 칼, 니퍼 사용
사포 처리: 표면을 매끄럽게 만들기 위해 220~400방 사포 활용
조립 홀 가공: 드릴을 이용해 나사 체결부 정밀 보정
(2) 조립 팁
나사 결합 방식을 사용하여 유지보수 용이성 확보
베어링 삽입 공간 확보하여 마찰력 감소

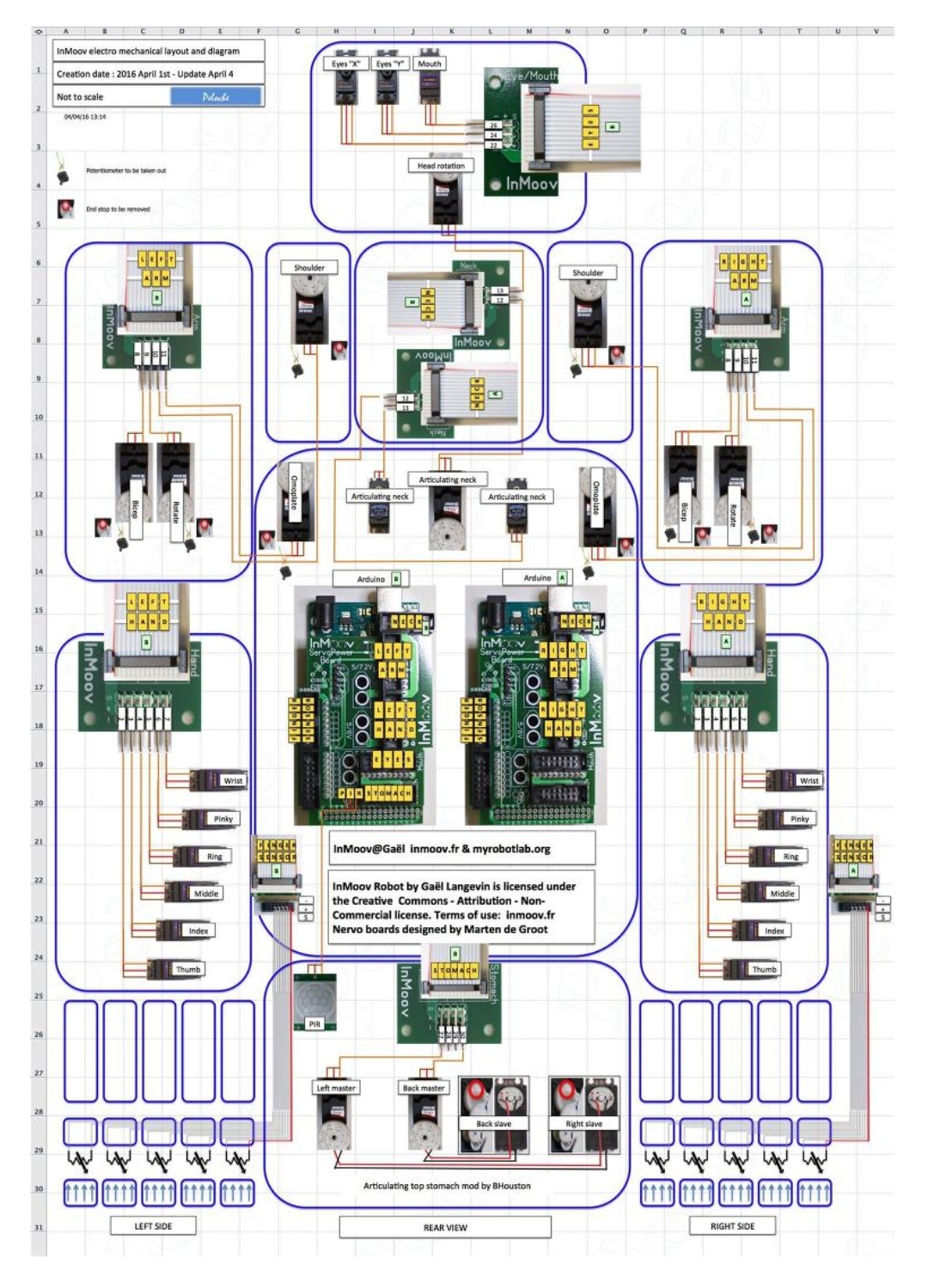
5. 로봇의 전자 제어 및 AI 연동
(1) 주요 전자 부품
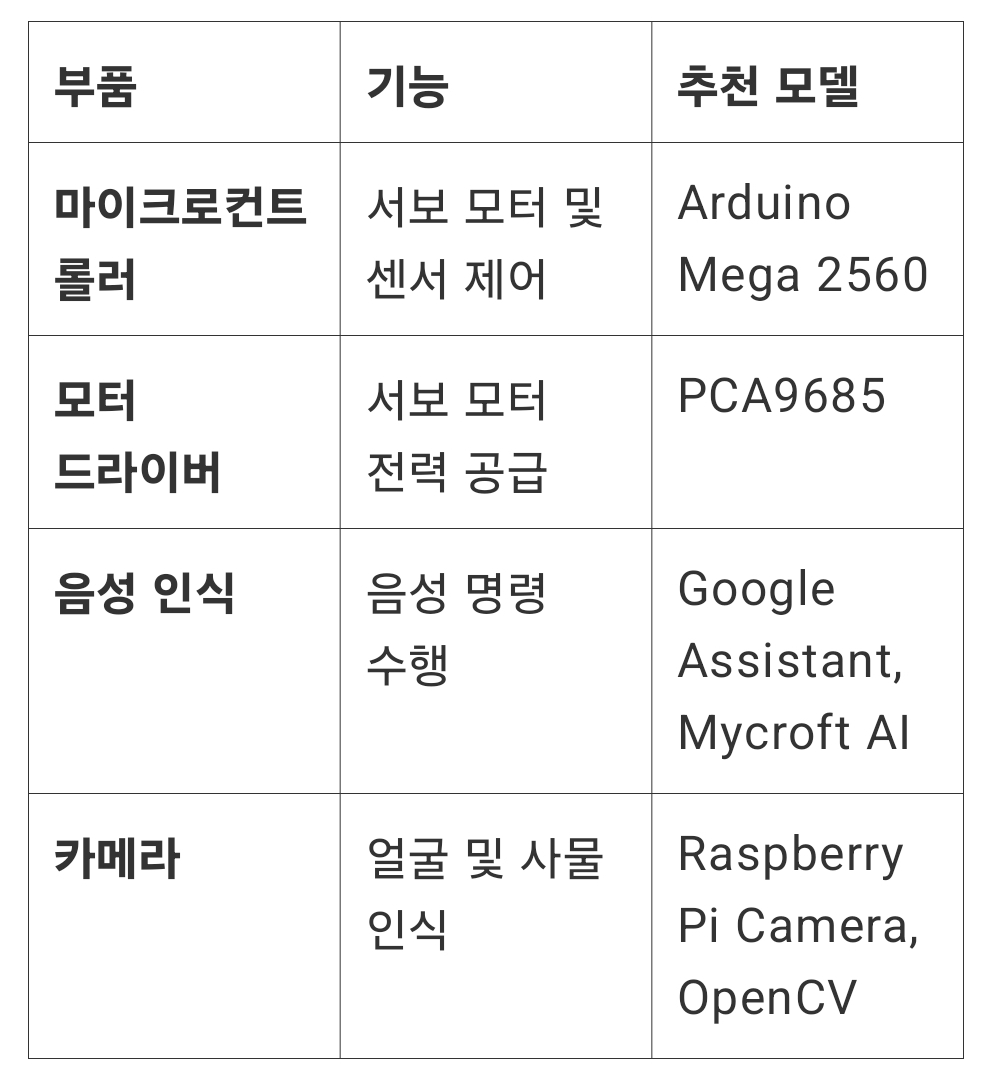
(2) AI 및 소프트웨어 연동
소프트웨어로, 서보 모터 제어 및 음성 인식 가능
Python & OpenCV: 얼굴 인식, 객체 감지 기능 추가
Raspberry Pi & Jetson Nano: AI 기반 영상 처리 연산 수행
6. 결론: 로봇 제작의 핵심 포인트
3D 프린터 활용: 모든 부품을 직접 출력해 조립 가능
모듈형 확장 가능: 사용자가 원하는 기능 추가 가능
전자 부품 연동: AI, IoT 기술을 접목해 스마트 로봇 구현
오픈소스 커뮤니티: GitHub, InMoov 공식 사이트에서 지속적인 업데이트 제공
프로젝트를 통해 AI, 로봇 공학, 3D 프린팅 기술을 직접 체험해보세요.


AI 휴머노이드 로봇 만들기
AI 휴머노이드 로봇 만들기 오픈소스로 개발된 3D 프린터 기반의 AI 휴머노이드 로봇으로, 누구나 제작하고 개조할 수 있는 장점이 있습니다. 이 글에서는 로봇을 3D 프린터를 활용해 만드는 방법
diy-laboratory.tistory.com
출처 : DIY연구소